Spooder - Linux Octopod Robot
Advanced 8-legged spider robot built with BeagleBone Blue and daisy-chained smart servos. Features Linux-based control system, wireless iOS app integration, and sophisticated walking algorithms with inverse kinematics.
Project Status
- Development Period: 2019-2020 (High School)
- Team: Collaborative project with iOS developer Daniel Vebman
- Community: Active build thread on RobotShop forum
- Note: Originally named “Spotacopter” with planned quadcopter capabilities; flight features were removed due to payload constraints
Overview
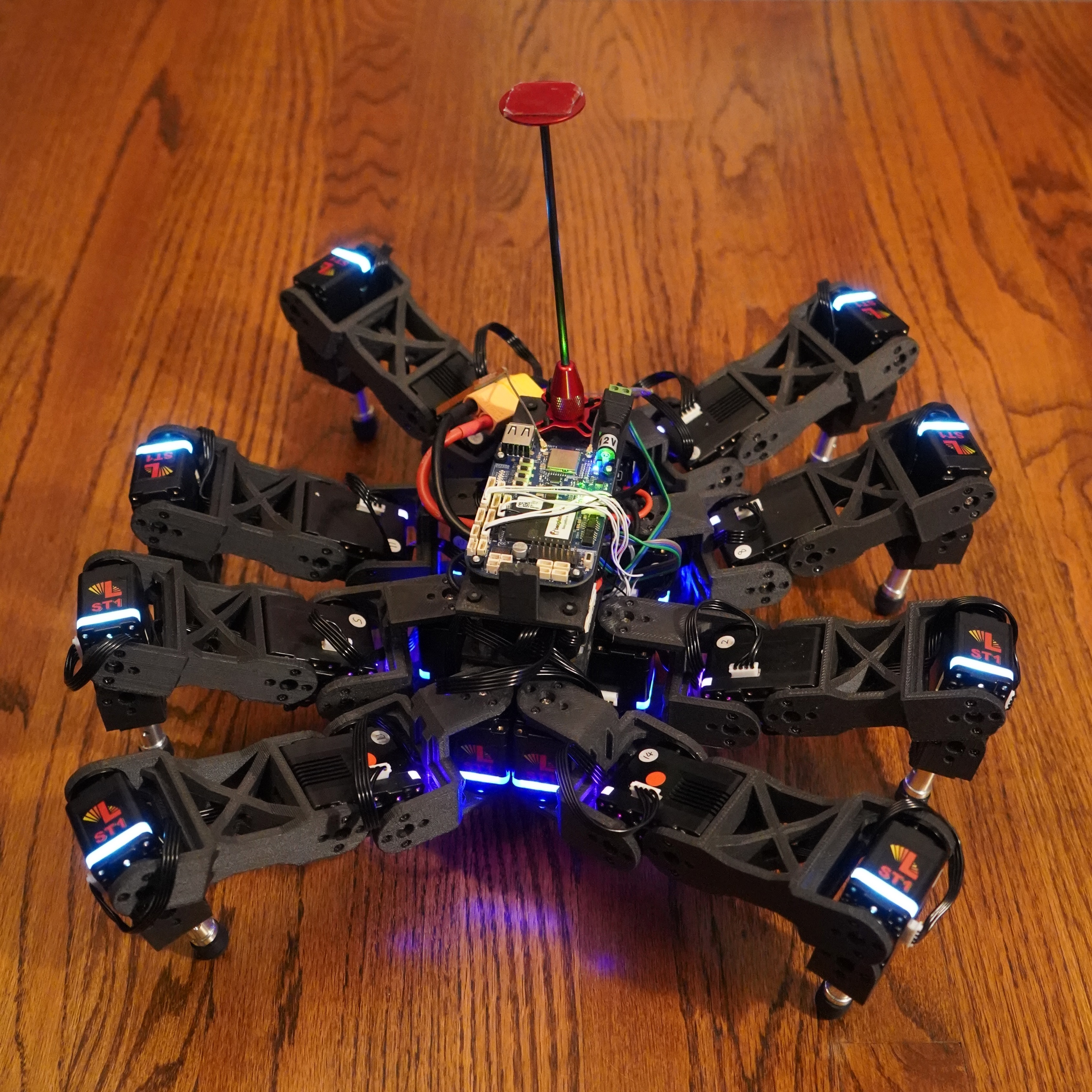
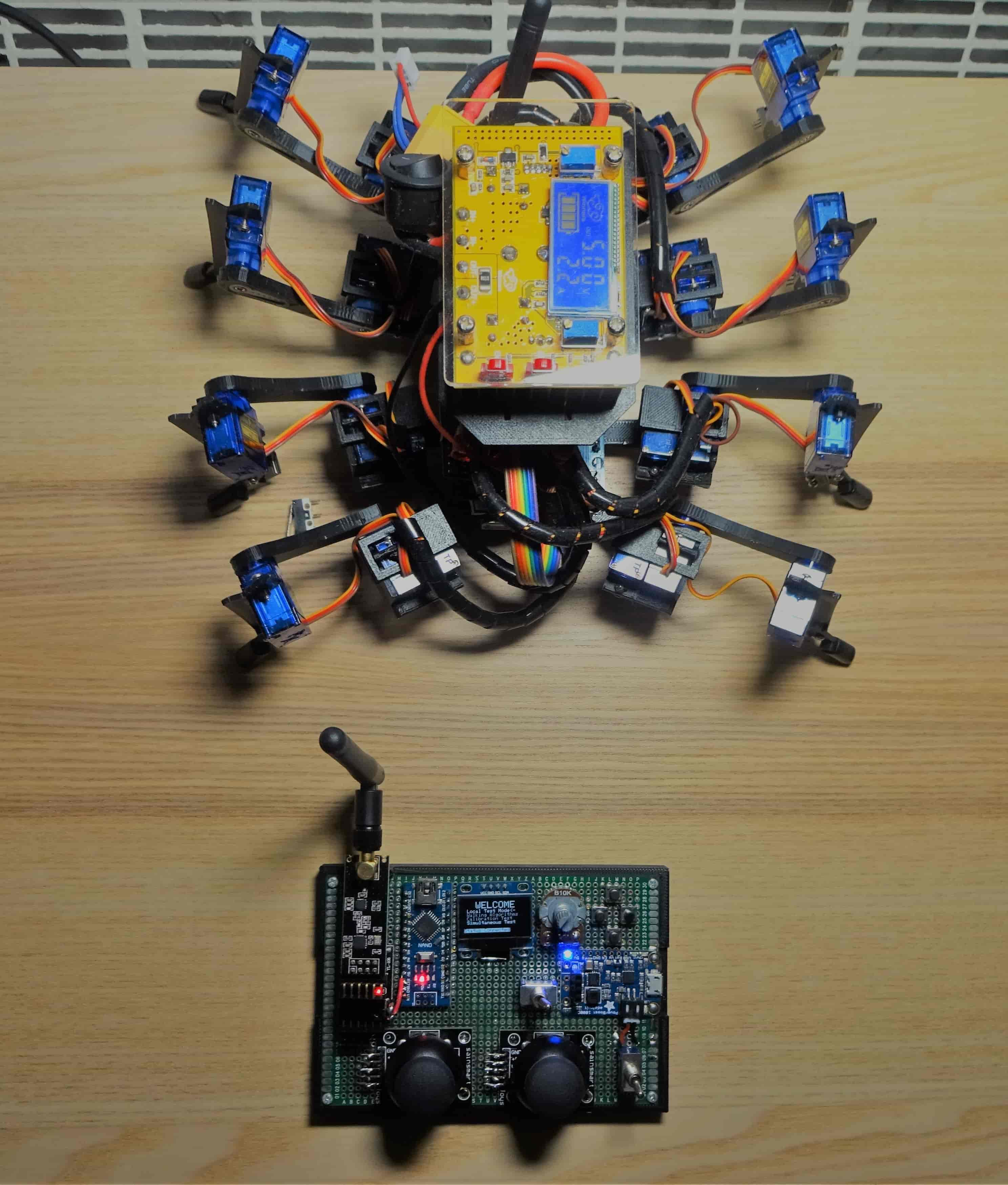
Spooder is an advanced Linux-based octopod robot with 8 legs and 24 degrees of freedom (3 per leg). Built during high school in collaboration with iOS developer Daniel Vebman, the robot runs on a BeagleBone Blue board and uses 24 daisy-chained smart servos for precise motion control.
The system combines inverse kinematics algorithms for leg positioning with adaptive walking gaits, controlled wirelessly through a custom iOS app I built with my partner. The app provides real-time WiFi communication and UDP video streaming for remote operation. All structural components were 3D-printed using carbon fiber-filled PLA for strength and durability.

From Arduino to Linux
Spooder represented a major leap from my earlier Spidy project—moving from Arduino to a full Linux system running on the BeagleBone Blue. This opened up possibilities for more sophisticated control and eventually the iOS app integration. I rewrote the walking algorithms in Python, adapting the 8-phase gait pattern I’d developed with Spidy. The smooth motion comes from incremental position updates combined with the LSS servos’ filtered position mode and tuned angular stiffness. This creates fluid, spider-like movement instead of the jerky motion typical of hobby servos.
I designed the mechanical and electrical systems along with the walking algorithms, while my partner Daniel developed the iOS control app with WiFi communication and UDP video streaming. The project was developed over 2 years. View source code →
Work-in-Progress
Spooder doing push-ups during its early development.
Testing out iOS Control App
Testing out the UDP streaming on iOS application designed by Daniel Vebman.
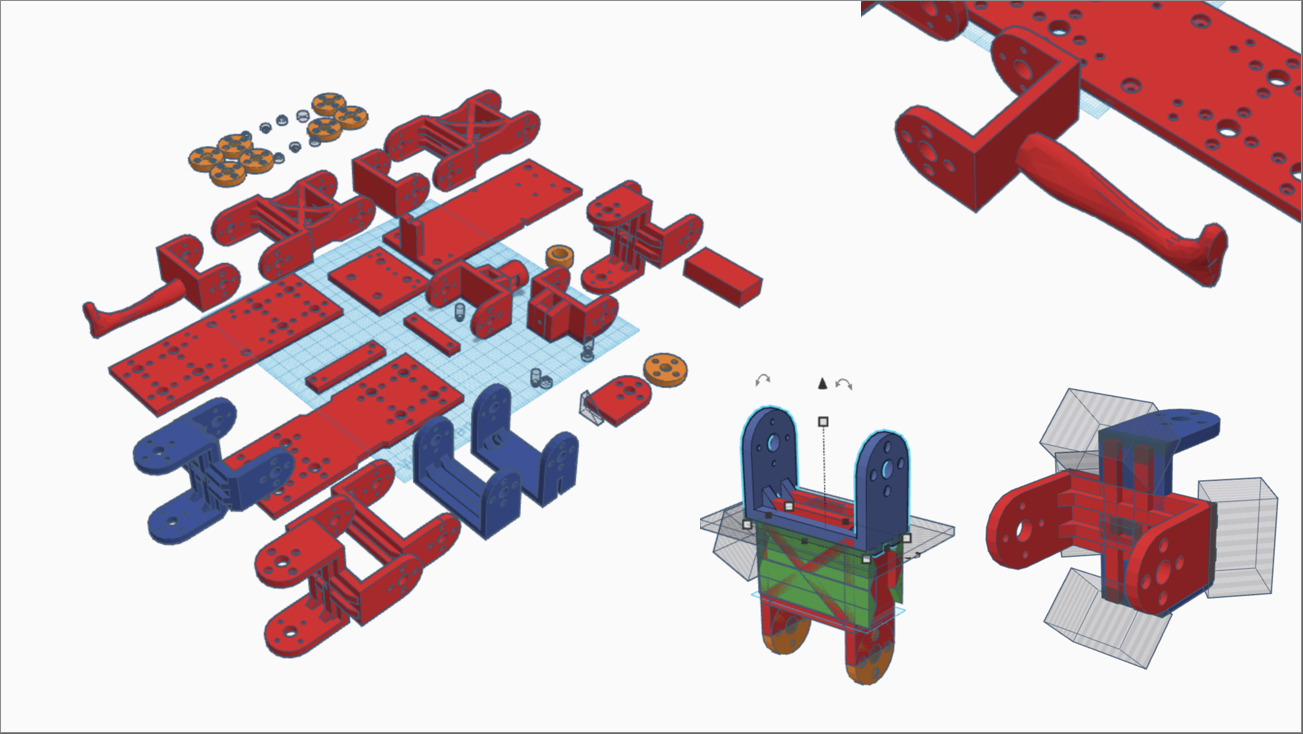
CAD Design
I designed all non-electronic components on TinkerCad and 3D-printed them with Carbon Fiber Filled PLA on my MakerGear.
Smart Servos and Serial Communication
One of the most elegant parts of Spooder’s design is the daisy-chained servo system. Instead of running 24 separate control wires, all servos connect through a single serial line. Each Lynxmotion Smart Servo has a unique ID and listens for its own commands while passing through data for the next servo in the chain. This meant we only needed four wires total for the entire robot: power, ground, and a single serial TX/RX pair running at 500,000 baud. The control loop recalculates all positions and updates every servo 45 times per second—fast enough that motion appears perfectly smooth to the human eye.
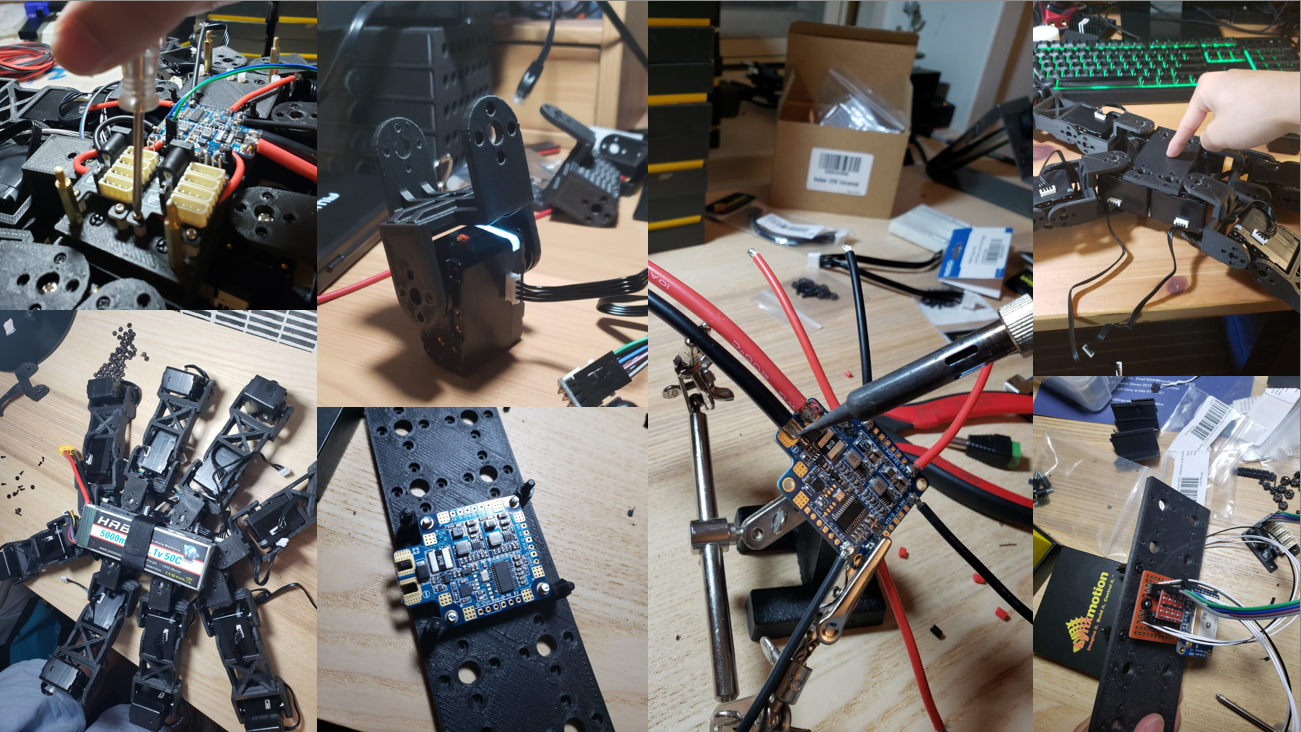
Assembly and Hardware
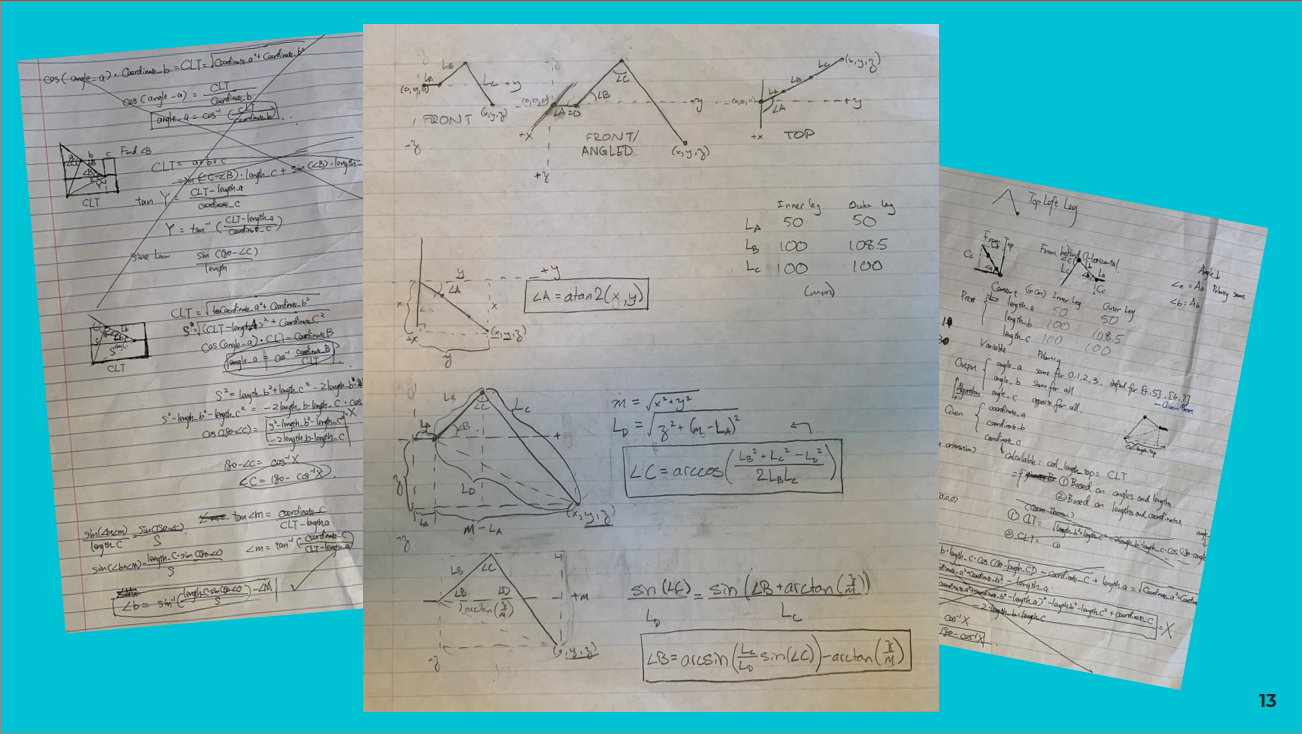
Inverse Kinematics
Each of Spooder’s legs has three joints that need precise angle calculations to place the foot at any desired position in 3D space. We used the law of cosines and law of sines to solve this—treating each leg as a series of triangles. Daniel and I ported the IK algorithms from Spidy, optimizing them for the BeagleBone Blue’s real-time performance requirements. Getting this math wrong meant legs would move in completely wrong directions, which happened plenty of times during development.
Computer Vision Experiments
We experimented with OpenCV for optical character recognition, but ran into performance issues on the BeagleBone Blue. The OCR processing was too slow for real-time operation. We explored the idea of offloading vision tasks to a separate compute module, but ultimately focused development efforts on perfecting the walking algorithms instead.

{kind=link}
Discover more...
Spidy - Arduino Octopod Robot
DIY Arduino Heat Bed for 3D Printer